I am currently a postdoctoral researcher at the Shenzhen Campus of Sun Yat-sen University.
My research focuses on exploiting the mechanical intelligence of rigid-flexible robots using advanced computational methods and machine learning tools.
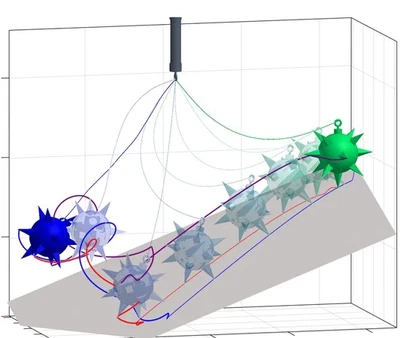
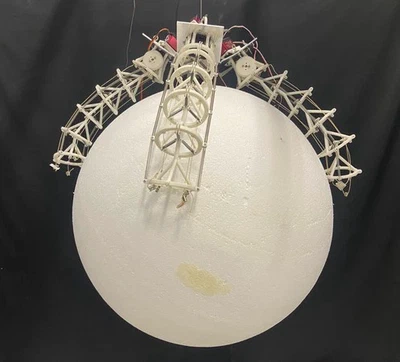
My doctoral study, advised by Prof. WU Zhigang, advanced tensegrity robotics through mechanical modeling and computational methods.
Before that, I worked on parallel computing and statistical analysis of turbulent flow under the mentorship of Prof. BAO Yun.
I am the creator of Rible.jl (逸步), an open-source Julia package for the computational design of rigid-flexible robots.
When my research gets stuck, I enjoy (not in the psychoanalytic sense) swimming, readings, and movies.