Cable-driven Tensegrity Manipulators
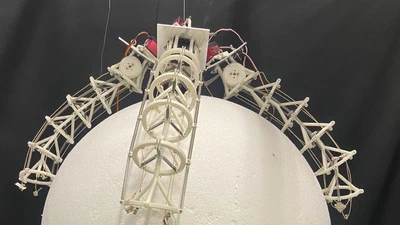
A bio-inspired multi-arm robot combining several spine-like tensegrity-based cable-driven manipulators to achieve compliant capture of uncooperative large objects.
A bio-inspired multi-arm robot combining several spine-like tensegrity-based cable-driven manipulators to achieve compliant capture of uncooperative large objects.
A differentiable simulator based on our newly proposed nonsmooth modified symplectic integration scheme, paving the way of integrating machine learning into multibody dynamics.

A tensegrity structure-based robotic fish featuring an internal driving mechanism that can achieve high-frequency undulations.
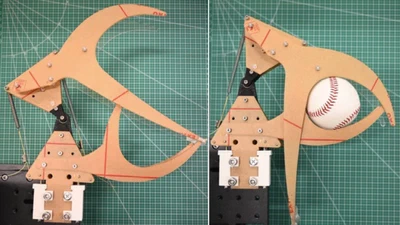
An automatic-triggered gripper that has a fast response time by exploiting the asymmetric bistability of the dual-triangle tensegrity mechanism.