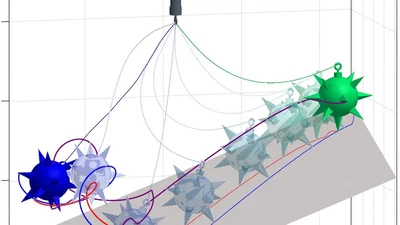
Multimodal Deformation in Tensegrity Manipulators: Preprogrammable Bend-Twist Modules for Dexterous Grasping Inspired by Elephant Trunks
Tensegrity-based continuum manipulators (TCMs) are rigid-flexible coupling mechanisms that show great promise for applications in unstructured environments by actively or passively …
yanghui-chen